Gecko Foot
Application ID: 1434
In nature, geckos use dry adhesion forces to climb walls. They have inspired researchers to develop synthetic gecko foot hairs to be used in, for example, robot applications.
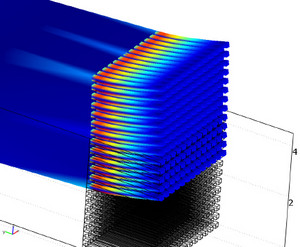
This model contains the nano/micro hierarchy of a synthetic gecko foot hair, where cantilever beams both in nano and micro scales describe the seta and spatula parts of one spatula stalk attached to a gecko foot.
The model uses the assembly feature and swept meshing to create a brick mesh. The analysis shows the stresses and deflection of the gecko foot caused by contact and friction forces.
This model example illustrates applications of this type that would nominally be built using the following products:
however, additional products may be required to completely define and model it. Furthermore, this example may also be defined and modeled using components from the following product combinations:
- COMSOL Multiphysics® and
- either the Acoustics Module, MEMS Module, Multibody Dynamics Module, or Structural Mechanics Module
The combination of COMSOL® products required to model your application depends on several factors and may include boundary conditions, material properties, physics interfaces, and part libraries. Particular functionality may be common to several products. To determine the right combination of products for your modeling needs, review the Specification Chart and make use of a free evaluation license. The COMSOL Sales and Support teams are available for answering any questions you may have regarding this.